- 关于MogDB
- 快速入门
- MogDB实训平台
- 容器化安装
- 单节点安装
- 访问数据库
- 使用命令行访问MogDB
- 使用图形工具访问MogDB
- 使用中间件访问MogDB
- 使用编程语言访问MogDB
- 使用样本数据集Mogila
- 特性描述
- 高性能
- 高可用
- 维护性
- 数据库安全
- 企业级特性
- 应用开发接口
- AI能力
- 安装指南
- 管理指南
- AI特性指南
- 概述
- Predictor:AI查询时间预测
- X-Tuner:参数调优与诊断
- SQLdiag:慢SQL发现
- Anomaly-detection:数据库指标采集、预测与异常监控
- Index-advisor:索引推荐
- DeepSQL:库内AI算法
- DB4AI:数据库原生AI引擎
- 安全指南
- 开发者指南
- 应用程序开发教程
- 开发规范
- 基于JDBC开发
- 概述
- JDBC包、驱动类和环境类
- 开发流程
- 加载驱动
- 连接数据库
- 连接数据库(以SSL方式)
- 执行SQL语句
- 处理结果集
- 关闭连接
- 日志管理
- 示例:常用操作
- 示例:重新执行应用SQL
- 示例:通过本地文件导入导出数据
- 示例:从MY向MogDB进行数据迁移
- 示例:逻辑复制代码示例
- 示例:不同场景下连接数据库参数配置
- JDBC接口参考
- java.sql.Connection
- java.sql.CallableStatement
- java.sql.DatabaseMetaData
- java.sql.Driver
- java.sql.PreparedStatement
- java.sql.ResultSet
- java.sql.ResultSetMetaData
- java.sql.Statement
- javax.sql.ConnectionPoolDataSource
- javax.sql.DataSource
- javax.sql.PooledConnection
- javax.naming.Context
- javax.naming.spi.InitialContextFactory
- CopyManager
- 基于ODBC开发
- 基于libpq开发
- 基于Psycopg开发
- 调试
- 附录
- 存储过程
- 用户自定义函数
- PL/pgSQL-SQL过程语言
- 定时任务
- 自治事务
- 逻辑复制
- Foreign Data Wrapper
- 物化视图
- 资源负载管理
- 应用程序开发教程
- 性能优化指南
- 参考指南
- 系统表及系统视图
- 系统表和系统视图概述
- 系统表
- GS_AUDITING_POLICY
- GS_AUDITING_POLICY_ACCESS
- GS_AUDITING_POLICY_FILTERS
- GS_AUDITING_POLICY_PRIVILEGES
- GS_CLIENT_GLOBAL_KEYS
- GS_CLIENT_GLOBAL_KEYS_ARGS
- GS_COLUMN_KEYS
- GS_COLUMN_KEYS_ARGS
- GS_ENCRYPTED_COLUMNS
- GS_ENCRYPTED_PROC
- GS_GLOBAL_CHAIN
- GS_MASKING_POLICY
- GS_MASKING_POLICY_ACTIONS
- GS_MASKING_POLICY_FILTERS
- GS_MATVIEW
- GS_MATVIEW_DEPENDENCY
- GS_OPT_MODEL
- GS_POLICY_LABEL
- GS_RECYCLEBIN
- GS_TXN_SNAPSHOT
- GS_WLM_INSTANCE_HISTORY
- GS_WLM_OPERATOR_INFO
- GS_WLM_PLAN_ENCODING_TABLE
- GS_WLM_PLAN_OPERATOR_INFO
- GS_WLM_EC_OPERATOR_INFO
- PG_AGGREGATE
- PG_AM
- PG_AMOP
- PG_AMPROC
- PG_APP_WORKLOADGROUP_MAPPING
- PG_ATTRDEF
- PG_ATTRIBUTE
- PG_AUTHID
- PG_AUTH_HISTORY
- PG_AUTH_MEMBERS
- PG_CAST
- PG_CLASS
- PG_COLLATION
- PG_CONSTRAINT
- PG_CONVERSION
- PG_DATABASE
- PG_DB_ROLE_SETTING
- PG_DEFAULT_ACL
- PG_DEPEND
- PG_DESCRIPTION
- PG_DIRECTORY
- PG_ENUM
- PG_EXTENSION
- PG_EXTENSION_DATA_SOURCE
- PG_FOREIGN_DATA_WRAPPER
- PG_FOREIGN_SERVER
- PG_FOREIGN_TABLE
- PG_INDEX
- PG_INHERITS
- PG_JOB
- PG_JOB_PROC
- PG_LANGUAGE
- PG_LARGEOBJECT
- PG_LARGEOBJECT_METADATA
- PG_NAMESPACE
- PG_OBJECT
- PG_OPCLASS
- PG_OPERATOR
- PG_OPFAMILY
- PG_PARTITION
- PG_PLTEMPLATE
- PG_PROC
- PG_RANGE
- PG_RESOURCE_POOL
- PG_REWRITE
- PG_RLSPOLICY
- PG_SECLABEL
- PG_SHDEPEND
- PG_SHDESCRIPTION
- PG_SHSECLABEL
- PG_STATISTIC
- PG_STATISTIC_EXT
- PG_SYNONYM
- PG_TABLESPACE
- PG_TRIGGER
- PG_TS_CONFIG
- PG_TS_CONFIG_MAP
- PG_TS_DICT
- PG_TS_PARSER
- PG_TS_TEMPLATE
- PG_TYPE
- PG_USER_MAPPING
- PG_USER_STATUS
- PG_WORKLOAD_GROUP
- PLAN_TABLE_DATA
- STATEMENT_HISTORY
- 系统视图
- GET_GLOBAL_PREPARED_XACTS(废弃)
- GS_AUDITING
- GS_AUDITING_ACCESS
- GS_AUDITING_PRIVILEGE
- GS_CLUSTER_RESOURCE_INFO
- GS_INSTANCE_TIME
- GS_LABELS
- GS_MASKING
- GS_MATVIEWS
- GS_SESSION_MEMORY
- GS_SESSION_CPU_STATISTICS
- GS_SESSION_MEMORY_CONTEXT
- GS_SESSION_MEMORY_DETAIL
- GS_SESSION_MEMORY_STATISTICS
- GS_SQL_COUNT
- GS_WLM_CGROUP_INFO
- GS_WLM_PLAN_OPERATOR_HISTORY
- GS_WLM_REBUILD_USER_RESOURCE_POOL
- GS_WLM_RESOURCE_POOL
- GS_WLM_USER_INFO
- GS_STAT_SESSION_CU
- GS_TOTAL_MEMORY_DETAIL
- MPP_TABLES
- PG_AVAILABLE_EXTENSION_VERSIONS
- PG_AVAILABLE_EXTENSIONS
- PG_COMM_DELAY
- PG_COMM_RECV_STREAM
- PG_COMM_SEND_STREAM
- PG_COMM_STATUS
- PG_CONTROL_GROUP_CONFIG
- PG_CURSORS
- PG_EXT_STATS
- PG_GET_INVALID_BACKENDS
- PG_GET_SENDERS_CATCHUP_TIME
- PG_GROUP
- PG_GTT_RELSTATS
- PG_GTT_STATS
- PG_GTT_ATTACHED_PIDS
- PG_INDEXES
- PG_LOCKS
- PG_NODE_ENV
- PG_OS_THREADS
- PG_PREPARED_STATEMENTS
- PG_PREPARED_XACTS
- PG_REPLICATION_SLOTS
- PG_RLSPOLICIES
- PG_ROLES
- PG_RULES
- PG_SECLABELS
- PG_SETTINGS
- PG_SHADOW
- PG_STATS
- PG_STAT_ACTIVITY
- PG_STAT_ALL_INDEXES
- PG_STAT_ALL_TABLES
- PG_STAT_BAD_BLOCK
- PG_STAT_BGWRITER
- PG_STAT_DATABASE
- PG_STAT_DATABASE_CONFLICTS
- PG_STAT_USER_FUNCTIONS
- PG_STAT_USER_INDEXES
- PG_STAT_USER_TABLES
- PG_STAT_REPLICATION
- PG_STAT_SYS_INDEXES
- PG_STAT_SYS_TABLES
- PG_STAT_XACT_ALL_TABLES
- PG_STAT_XACT_SYS_TABLES
- PG_STAT_XACT_USER_FUNCTIONS
- PG_STAT_XACT_USER_TABLES
- PG_STATIO_ALL_INDEXES
- PG_STATIO_ALL_SEQUENCES
- PG_STATIO_ALL_TABLES
- PG_STATIO_SYS_INDEXES
- PG_STATIO_SYS_SEQUENCES
- PG_STATIO_SYS_TABLES
- PG_STATIO_USER_INDEXES
- PG_STATIO_USER_SEQUENCES
- PG_STATIO_USER_TABLES
- PG_TABLES
- PG_TDE_INFO
- PG_THREAD_WAIT_STATUS
- PG_TIMEZONE_ABBREVS
- PG_TIMEZONE_NAMES
- PG_TOTAL_MEMORY_DETAIL
- PG_TOTAL_USER_RESOURCE_INFO
- PG_TOTAL_USER_RESOURCE_INFO_OID
- PG_USER
- PG_USER_MAPPINGS
- PG_VARIABLE_INFO
- PG_VIEWS
- PLAN_TABLE
- GS_FILE_STAT
- GS_OS_RUN_INFO
- GS_REDO_STAT
- GS_SESSION_STAT
- GS_SESSION_TIME
- GS_THREAD_MEMORY_CONTEXT
- 系统函数
- 支持的数据类型
- SQL语法
- ABORT
- ALTER AGGREGATE
- ALTER AUDIT POLICY
- ALTER DATABASE
- ALTER DATA SOURCE
- ALTER DEFAULT PRIVILEGES
- ALTER DIRECTORY
- ALTER EXTENSION
- ALTER FOREIGN TABLE
- ALTER FUNCTION
- ALTER GROUP
- ALTER INDEX
- ALTER LANGUAGE
- ALTER LARGE OBJECT
- ALTER MASKING POLICY
- ALTER MATERIALIZED VIEW
- ALTER OPERATOR
- ALTER RESOURCE LABEL
- ALTER RESOURCE POOL
- ALTER ROLE
- ALTER ROW LEVEL SECURITY POLICY
- ALTER RULE
- ALTER SCHEMA
- ALTER SEQUENCE
- ALTER SERVER
- ALTER SESSION
- ALTER SYNONYM
- ALTER SYSTEM KILL SESSION
- ALTER SYSTEM SET
- ALTER TABLE
- ALTER TABLE PARTITION
- ALTER TABLE SUBPARTITION
- ALTER TABLESPACE
- ALTER TEXT SEARCH CONFIGURATION
- ALTER TEXT SEARCH DICTIONARY
- ALTER TRIGGER
- ALTER TYPE
- ALTER USER
- ALTER USER MAPPING
- ALTER VIEW
- ANALYZE | ANALYSE
- BEGIN
- CALL
- CHECKPOINT
- CLEAN CONNECTION
- CLOSE
- CLUSTER
- COMMENT
- COMMIT | END
- COMMIT PREPARED
- CONNECT BY
- COPY
- CREATE AGGREGATE
- CREATE AUDIT POLICY
- CREATE CAST
- CREATE CLIENT MASTER KEY
- CREATE COLUMN ENCRYPTION KEY
- CREATE DATABASE
- CREATE DATA SOURCE
- CREATE DIRECTORY
- CREATE EXTENSION
- CREATE FOREIGN TABLE
- CREATE FUNCTION
- CREATE GROUP
- CREATE INCREMENTAL MATERIALIZED VIEW
- CREATE INDEX
- CREATE LANGUAGE
- CREATE MASKING POLICY
- CREATE MATERIALIZED VIEW
- CREATE MODEL
- CREATE OPERATOR
- CREATE PACKAGE
- CREATE ROW LEVEL SECURITY POLICY
- CREATE PROCEDURE
- CREATE RESOURCE LABEL
- CREATE RESOURCE POOL
- CREATE ROLE
- CREATE RULE
- CREATE SCHEMA
- CREATE SEQUENCE
- CREATE SERVER
- CREATE SYNONYM
- CREATE TABLE
- CREATE TABLE AS
- CREATE TABLE PARTITION
- CREATE TABLE SUBPARTITION
- CREATE TABLESPACE
- CREATE TEXT SEARCH CONFIGURATION
- CREATE TEXT SEARCH DICTIONARY
- CREATE TRIGGER
- CREATE TYPE
- CREATE USER
- CREATE USER MAPPING
- CREATE VIEW
- CREATE WEAK PASSWORD DICTIONARY
- CURSOR
- DEALLOCATE
- DECLARE
- DELETE
- DO
- DROP AGGREGATE
- DROP AUDIT POLICY
- DROP CAST
- DROP CLIENT MASTER KEY
- DROP COLUMN ENCRYPTION KEY
- DROP DATABASE
- DROP DATA SOURCE
- DROP DIRECTORY
- DROP EXTENSION
- DROP FOREIGN TABLE
- DROP FUNCTION
- DROP GROUP
- DROP INDEX
- DROP LANGUAGE
- DROP MASKING POLICY
- DROP MATERIALIZED VIEW
- DROP MODEL
- DROP OPERATOR
- DROP OWNED
- DROP PACKAGE
- DROP PROCEDURE
- DROP RESOURCE LABEL
- DROP RESOURCE POOL
- DROP ROW LEVEL SECURITY POLICY
- DROP ROLE
- DROP RULE
- DROP SCHEMA
- DROP SEQUENCE
- DROP SERVER
- DROP SYNONYM
- DROP TABLE
- DROP TABLESPACE
- DROP TEXT SEARCH CONFIGURATION
- DROP TEXT SEARCH DICTIONARY
- DROP TRIGGER
- DROP TYPE
- DROP USER
- DROP USER MAPPING
- DROP VIEW
- DROP WEAK PASSWORD DICTIONARY
- EXECUTE
- EXECUTE DIRECT
- EXPLAIN
- EXPLAIN PLAN
- FETCH
- GRANT
- INSERT
- LOCK
- MOVE
- MERGE INTO
- PREDICT BY
- PREPARE
- PREPARE TRANSACTION
- PURGE
- REASSIGN OWNED
- REFRESH INCREMENTAL MATERIALIZED VIEW
- REFRESH MATERIALIZED VIEW
- REINDEX
- RELEASE SAVEPOINT
- RESET
- REVOKE
- ROLLBACK
- ROLLBACK PREPARED
- ROLLBACK TO SAVEPOINT
- SAVEPOINT
- SELECT
- SELECT INTO
- SET
- SET CONSTRAINTS
- SET ROLE
- SET SESSION AUTHORIZATION
- SET TRANSACTION
- SHOW
- SHUTDOWN
- SNAPSHOT
- START TRANSACTION
- TIMECAPSULE TABLE
- TRUNCATE
- UPDATE
- VACUUM
- VALUES
- SQL参考
- GUC参数说明
- Schema
- Information Schema
- DBE_PERF
- 概述
- OS
- Instance
- Memory
- File
- Object
- STAT_USER_TABLES
- SUMMARY_STAT_USER_TABLES
- GLOBAL_STAT_USER_TABLES
- STAT_USER_INDEXES
- SUMMARY_STAT_USER_INDEXES
- GLOBAL_STAT_USER_INDEXES
- STAT_SYS_TABLES
- SUMMARY_STAT_SYS_TABLES
- GLOBAL_STAT_SYS_TABLES
- STAT_SYS_INDEXES
- SUMMARY_STAT_SYS_INDEXES
- GLOBAL_STAT_SYS_INDEXES
- STAT_ALL_TABLES
- SUMMARY_STAT_ALL_TABLES
- GLOBAL_STAT_ALL_TABLES
- STAT_ALL_INDEXES
- SUMMARY_STAT_ALL_INDEXES
- GLOBAL_STAT_ALL_INDEXES
- STAT_DATABASE
- SUMMARY_STAT_DATABASE
- GLOBAL_STAT_DATABASE
- STAT_DATABASE_CONFLICTS
- SUMMARY_STAT_DATABASE_CONFLICTS
- GLOBAL_STAT_DATABASE_CONFLICTS
- STAT_XACT_ALL_TABLES
- SUMMARY_STAT_XACT_ALL_TABLES
- GLOBAL_STAT_XACT_ALL_TABLES
- STAT_XACT_SYS_TABLES
- SUMMARY_STAT_XACT_SYS_TABLES
- GLOBAL_STAT_XACT_SYS_TABLES
- STAT_XACT_USER_TABLES
- SUMMARY_STAT_XACT_USER_TABLES
- GLOBAL_STAT_XACT_USER_TABLES
- STAT_XACT_USER_FUNCTIONS
- SUMMARY_STAT_XACT_USER_FUNCTIONS
- GLOBAL_STAT_XACT_USER_FUNCTIONS
- STAT_BAD_BLOCK
- SUMMARY_STAT_BAD_BLOCK
- GLOBAL_STAT_BAD_BLOCK
- STAT_USER_FUNCTIONS
- SUMMARY_STAT_USER_FUNCTIONS
- GLOBAL_STAT_USER_FUNCTIONS
- Workload
- Session/Thread
- SESSION_STAT
- GLOBAL_SESSION_STAT
- SESSION_TIME
- GLOBAL_SESSION_TIME
- SESSION_MEMORY
- GLOBAL_SESSION_MEMORY
- SESSION_MEMORY_DETAIL
- GLOBAL_SESSION_MEMORY_DETAIL
- SESSION_STAT_ACTIVITY
- GLOBAL_SESSION_STAT_ACTIVITY
- THREAD_WAIT_STATUS
- GLOBAL_THREAD_WAIT_STATUS
- LOCAL_THREADPOOL_STATUS
- GLOBAL_THREADPOOL_STATUS
- SESSION_CPU_RUNTIME
- SESSION_MEMORY_RUNTIME
- STATEMENT_IOSTAT_COMPLEX_RUNTIME
- LOCAL_ACTIVE_SESSION
- Transaction
- Query
- STATEMENT
- SUMMARY_STATEMENT
- STATEMENT_COUNT
- GLOBAL_STATEMENT_COUNT
- SUMMARY_STATEMENT_COUNT
- GLOBAL_STATEMENT_COMPLEX_HISTORY
- GLOBAL_STATEMENT_COMPLEX_HISTORY_TABLE
- GLOBAL_STATEMENT_COMPLEX_RUNTIME
- STATEMENT_RESPONSETIME_PERCENTILE
- STATEMENT_USER_COMPLEX_HISTORY
- STATEMENT_COMPLEX_RUNTIME
- STATEMENT_COMPLEX_HISTORY_TABLE
- STATEMENT_COMPLEX_HISTORY
- STATEMENT_WLMSTAT_COMPLEX_RUNTIME
- STATEMENT_HISTORY
- Cache/IO
- STATIO_USER_TABLES
- SUMMARY_STATIO_USER_TABLES
- GLOBAL_STATIO_USER_TABLES
- STATIO_USER_INDEXES
- SUMMARY_STATIO_USER_INDEXES
- GLOBAL_STATIO_USER_INDEXES
- STATIO_USER_SEQUENCES
- SUMMARY_STATIO_USER_SEQUENCES
- GLOBAL_STATIO_USER_SEQUENCES
- STATIO_SYS_TABLES
- SUMMARY_STATIO_SYS_TABLES
- GLOBAL_STATIO_SYS_TABLES
- STATIO_SYS_INDEXES
- SUMMARY_STATIO_SYS_INDEXES
- GLOBAL_STATIO_SYS_INDEXES
- STATIO_SYS_SEQUENCES
- SUMMARY_STATIO_SYS_SEQUENCES
- GLOBAL_STATIO_SYS_SEQUENCES
- STATIO_ALL_TABLES
- SUMMARY_STATIO_ALL_TABLES
- GLOBAL_STATIO_ALL_TABLES
- STATIO_ALL_INDEXES
- SUMMARY_STATIO_ALL_INDEXES
- GLOBAL_STATIO_ALL_INDEXES
- STATIO_ALL_SEQUENCES
- SUMMARY_STATIO_ALL_SEQUENCES
- GLOBAL_STATIO_ALL_SEQUENCES
- GLOBAL_STAT_DB_CU
- GLOBAL_STAT_SESSION_CU
- Utility
- REPLICATION_STAT
- GLOBAL_REPLICATION_STAT
- REPLICATION_SLOTS
- GLOBAL_REPLICATION_SLOTS
- BGWRITER_STAT
- GLOBAL_BGWRITER_STAT
- GLOBAL_CKPT_STATUS
- GLOBAL_DOUBLE_WRITE_STATUS
- GLOBAL_PAGEWRITER_STATUS
- GLOBAL_RECORD_RESET_TIME
- GLOBAL_REDO_STATUS
- GLOBAL_RECOVERY_STATUS
- CLASS_VITAL_INFO
- USER_LOGIN
- SUMMARY_USER_LOGIN
- GLOBAL_GET_BGWRITER_STATUS
- GLOBAL_SINGLE_FLUSH_DW_STATUS
- GLOBAL_CANDIDATE_STATUS
- Lock
- Wait Events
- Configuration
- Operator
- Workload Manager
- Global Plancache
- RTO
- 附录
- DBE_PLDEBUGGER Schema
- DBE_PLDEBUGGER Schema概述
- DBE_PLDEBUGGER.turn_on
- DBE_PLDEBUGGER.turn_off
- DBE_PLDEBUGGER.local_debug_server_info
- DBE_PLDEBUGGER.attach
- DBE_PLDEBUGGER.next
- DBE_PLDEBUGGER.continue
- DBE_PLDEBUGGER.abort
- DBE_PLDEBUGGER.print_var
- DBE_PLDEBUGGER.info_code
- DBE_PLDEBUGGER.step
- DBE_PLDEBUGGER.add_breakpoint
- DBE_PLDEBUGGER.delete_breakpoint
- DBE_PLDEBUGGER.info_breakpoints
- DBE_PLDEBUGGER.backtrace
- DBE_PLDEBUGGER.finish
- DBE_PLDEBUGGER.set_var
- DB4AI Schema
- 工具参考
- 工具一览表
- 客户端工具
- 服务端工具
- 系统内部使用的工具
- mogdb
- gs_backup
- gs_basebackup
- gs_ctl
- gs_initdb
- gs_install
- gs_install_plugin
- gs_install_plugin_local
- gs_preinstall
- gs_sshexkey
- gs_tar
- gs_uninstall
- gs_upgradectl
- gs_expansion
- gs_dropnode
- gs_probackup
- gstrace
- kdb5_util
- kadmin.local
- kinit
- klist
- krb5kdc
- kdestroy
- pg_config
- pg_controldata
- pg_recvlogical
- pg_resetxlog
- pg_archivecleanup
- pssh
- pscp
- transfer.py
- FAQ
- gs_collector工具支持收集的系统表和视图列表
- 插件
- 数据库报错信息
- SQL标准错误码说明
- 第三方库错误码说明
- GAUSS-00001 - GAUSS-00100
- GAUSS-00101 - GAUSS-00200
- GAUSS 00201 - GAUSS 00300
- GAUSS 00301 - GAUSS 00400
- GAUSS 00401 - GAUSS 00500
- GAUSS 00501 - GAUSS 00600
- GAUSS 00601 - GAUSS 00700
- GAUSS 00701 - GAUSS 00800
- GAUSS 00801 - GAUSS 00900
- GAUSS 00901 - GAUSS 01000
- GAUSS 01001 - GAUSS 01100
- GAUSS 01101 - GAUSS 01200
- GAUSS 01201 - GAUSS 01300
- GAUSS 01301 - GAUSS 01400
- GAUSS 01401 - GAUSS 01500
- GAUSS 01501 - GAUSS 01600
- GAUSS 01601 - GAUSS 01700
- GAUSS 01701 - GAUSS 01800
- GAUSS 01801 - GAUSS 01900
- GAUSS 01901 - GAUSS 02000
- GAUSS 02001 - GAUSS 02100
- GAUSS 02101 - GAUSS 02200
- GAUSS 02201 - GAUSS 02300
- GAUSS 02301 - GAUSS 02400
- GAUSS 02401 - GAUSS 02500
- GAUSS 02501 - GAUSS 02600
- GAUSS 02601 - GAUSS 02700
- GAUSS 02701 - GAUSS 02800
- GAUSS 02801 - GAUSS 02900
- GAUSS 02901 - GAUSS 03000
- GAUSS 03001 - GAUSS 03100
- GAUSS 03101 - GAUSS 03200
- GAUSS 03201 - GAUSS 03300
- GAUSS 03301 - GAUSS 03400
- GAUSS 03401 - GAUSS 03500
- GAUSS 03501 - GAUSS 03600
- GAUSS 03601 - GAUSS 03700
- GAUSS 03701 - GAUSS 03800
- GAUSS 03801 - GAUSS 03900
- GAUSS 03901 - GAUSS 04000
- GAUSS 04001 - GAUSS 04100
- GAUSS 04101 - GAUSS 04200
- GAUSS 04201 - GAUSS 04300
- GAUSS 04301 - GAUSS 04400
- GAUSS 04401 - GAUSS 04500
- GAUSS 04501 - GAUSS 04600
- GAUSS 04601 - GAUSS 04700
- GAUSS 04701 - GAUSS 04800
- GAUSS 04801 - GAUSS 04900
- GAUSS 04901 - GAUSS 05000
- GAUSS 05001 - GAUSS 05100
- GAUSS 05101 - GAUSS 05200
- GAUSS 05201 - GAUSS 05300
- GAUSS 05301 - GAUSS 05400
- GAUSS 05401 - GAUSS 05500
- GAUSS 05501 - GAUSS 05600
- GAUSS 05601 - GAUSS 05700
- GAUSS 05701 - GAUSS 05800
- GAUSS 05801 - GAUSS 05900
- GAUSS 05901 - GAUSS 06000
- GAUSS 06001 - GAUSS 06100
- GAUSS 06101 - GAUSS 06200
- GAUSS 06201 - GAUSS 06300
- GAUSS 06301 - GAUSS 06400
- GAUSS 06401 - GAUSS 06500
- GAUSS 06501 - GAUSS 06600
- GAUSS 06601 - GAUSS 06700
- GAUSS 06701 - GAUSS 06800
- GAUSS 06801 - GAUSS 06900
- GAUSS 06901 - GAUSS 07000
- GAUSS 07001 - GAUSS 07100
- GAUSS 07101 - GAUSS 07200
- GAUSS 07201 - GAUSS 07300
- GAUSS 07301 - GAUSS 07400
- GAUSS 07401 - GAUSS 07480
- GAUSS 50000 - GAUSS 50999
- GAUSS 51000 - GAUSS 51999
- GAUSS 52000 - GAUSS 52999
- GAUSS 53000 - GAUSS 53699
- 错误日志信息参考
- 系统表及系统视图
- 故障诊断指南
- 常见故障定位手段
- 常见故障定位案例
- core问题定位
- 权限/会话/数据类型问题定位
- 服务/高可用/并发问题定位
- 表/分区表问题定位
- 文件系统/磁盘/内存问题定位
- SQL问题定位
- 索引问题定位
- 源码解析
- 常见问题解答 (FAQs)
- 术语表
MOT并发控制机制
通过大量研究,我们找到了最佳的并发控制机制,结论为:基于SILO的OCC算法是MOT中最符合ACID特性的OCC算法。SILO为满足MOT的挑战性需求提供了最好的基础。
说明: MOT完全符合原子性、一致性、隔离性、持久性(ACID)特性,如MOT简介所述。
下面介绍MOT的并发控制机制。
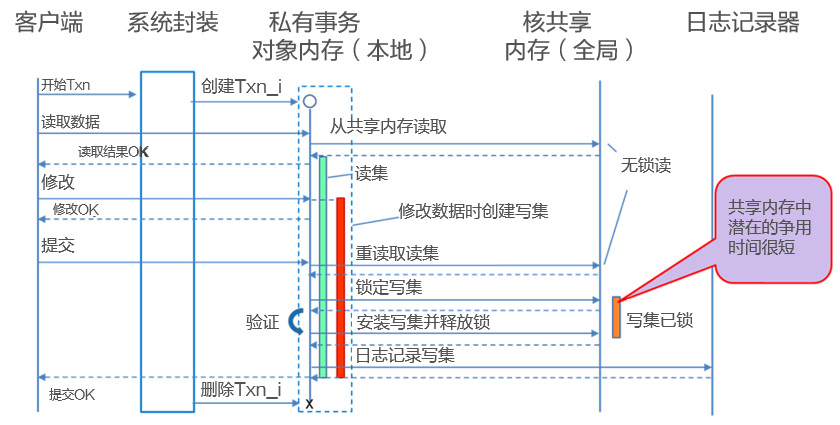
MOT本地内存和全局内存
SILO管理本地内存和全局内存,如图1所示。
- 全局内存是所有核共享的长期内存,主要用于存储所有的表数据和索引。
- 本地内存是短期内存,主要由会话使用,用于处理事务及将数据更改存储到事务内存中,直到提交阶段。
当事务需要更改时,SILO将该事务的所有数据从全局内存复制到本地内存。使用OCC方法,全局内存中放置的是最小的锁,因此争用时间极短。事务更改完成后,该数据从本地内存回推到全局内存中。
本地内存与SILO增强并发控制的基本交互式事务流如下所示:
图 1 私有(本地)内存(每个事务)和全局内存(所有核的所有事务)
具体请参见Industrial-Strength OLTP Using Main Memory and Many-cores[对比:磁盘与MOT]。
MOT SILO增强特性
SILO凭借其基本算法流程,优于我们在研究实验中测试的许多其他符合ACID的OCC算法。然而,为了使SILO成为产品级机制,我们必须用许多在最初设计中缺失的基本功能来增强它,例如:
- 新增对交互式事务的支持,其中事务的SQL运行在客户端实现,而不是作为服务器端的单个步骤运行。
- 新增乐观插入
- 新增对非唯一索引的支持
- 新增对事务中写后读校验(RAW)的支持,使用户能够在提交之前查看更改
- 新增对无锁协同垃圾回收的支持
- 新增对无锁检查点的支持
- 新增对快速恢复的支持
- 新增对分布式部署两阶段提交的支持
在不破坏原始SILO的可扩展特性的前提下添加这些增强是非常具有挑战性的。
MOT隔离级别
即使MOT完全兼容ACID,MogDB 2.1并非支持所有的隔离级别。下表介绍了各隔离级别,以及MOT支持和不支持的内容。
表 1 隔离级别
| 隔离级别 | 说明 |
|---|---|
| READ UNCOMMITTED | MOT不支持 |
| READ COMMITTED | MOT支持 READ COMMITTED(读已提交)隔离级别保证任何正在读取的数据在上一次读取时都已提交。它只是限制读者看到任何中间数据、未提交数据,或脏读。数据被读取后可以自由更改,因此,读已提交隔离级别并不保证事务再次读取时能找到相同的数据。 |
| SNAPSHOT | MOT不支持 SNAPSHOT(快照)隔离级别提供与SERIALIZABLE(可序列化)相同的保证,同时支持并发事务修改数据。相反,它迫使每个读者看到自己的世界版本(自己的快照)。不阻止并发更新使得编程非常容易,且可扩展性很强。然而,在许多实现中,这种隔离级别需要更高的服务器资源。 |
| REPEATABLE READ | MOT支持 REPEATABLE READ(可重复读)是一个更高的隔离级别,除了READ COMMITTED隔离级别的保证之外,它还保证任何读取的数据都不能更改。如果一个事务再次读取相同的数据,它将找出该数据,不做更改,并且保证它可读取。乐观模型使得并发事务能更新该事务读取的行。在提交时,该事务将验证REPEATABLE READ隔离级别是否被违反。若违反,则回滚该事务,必须重试。 |
| SERIALIZABLE | MOT不支持 SERIALIZABLE(可序列化)隔离提供了更强的保证。除了REPEATABLE READ隔离级别保证的所有内容外,它还保证后续读取不会看到新数据。它之所以被命名为SERIALIZABLE,是因为隔离非常严格,几乎有点像事务串行运行,而不是并行运行。 |
下表显示了不同隔离级别启用的并发副作用。
表 2 隔离级别启用的并发副作用
| 隔离级别 | 说明 | 不可重复读 | 幻影 |
|---|---|---|---|
| READ UNCOMMITTED | 是 | 是 | 是 |
| READ COMMITTED | 否 | 是 | 是 |
| REPEATABLE READ | 否 | 否 | 是 |
| SNAPSHOT | 否 | 否 | 否 |
| SERIALIZABLE | 否 | 否 | 否 |
在不久后将发布的版本中,MogDB MOT还将支持SNAPSHOT和SERIALIZABLE隔离级别。
MOT乐观并发控制
并发控制模块(简称CC模块)提供了主内存引擎的所有事务性需求。CC模块的主要目标是为主内存引擎提供各种隔离级别的支持。
乐观OCC与悲观2PL
悲观2PL(2阶段锁定)和乐观并发控制(OCC)的功能差异在于对事务完整性分别采用悲观和乐观方法。
基于磁盘的表使用悲观方法,这是最常用的数据库方法。MOT引擎使用的是乐观方法。
悲观方法和乐观方法的主要功能区别在于,如果冲突发生,
- 悲观的方法会导致客户端等待;
- 而乐观方法会导致其中一个事务失败,使得客户端必须重试失败的事务。
乐观并发控制方法(MOT使用)
乐观并发控制(OCC)方法在冲突发生时检测冲突,并在提交时执行验证检查。
乐观方法开销较小,而且通常效率更高,原因之一是事务冲突在大多数应用程序中并不常见。
当强制执行REPEATABLE READ隔离级别时,乐观方法与悲观方法之间的函数差异更大,而当强制执行SERIALIZABLE隔离级别时,函数差异最大。
悲观方法(MOT未使用)
悲观并发控制(2PL,或称2阶段锁定)方法使用锁阻止在潜在冲突的发生。执行语句时应用锁,提交事务时释放锁。基于磁盘的行存储使用这种方法,并且添加了多版本并发控制(Multi-version Concurrency Control,MVCC)。
在2PL算法中,当一个事务正在写入行时,其他事务不能访问该行;当一个行正在读取时,其他事务不能覆盖该行。在访问时锁定每个行,以进行读写;在提交时释放锁。这些算法需要一个处理和避免死锁的方案。死锁可以通过计算等待图中的周期来检测。死锁可以通过使用TSO保持时序或使用某种回退方案来避免。
遇时锁定(ETL)
另一种方法是遇时锁定(ETL),它以乐观的方式处理读取,但写入操作锁定它们访问的数据。因此,来自不同ETL事务的写入操作相互感知,并可以决定中止。实验证明,ETL通过两种方式提高OCC的性能:
- 首先,ETL会在早期检测冲突,并通常能增加事务吞吐量。这是因为事务不会执行无用的操作。(通常)在提交时发现的冲突无法在不中止至少一个事务的情况下解决。
- 其次,ETL写后读校验(RAW)运行高效,无需昂贵或复杂的机制。
结论:
OCC是大多数工作负载最快的选项。这一点我们在初步研究阶段已经发现。
其中一个原因是,当每个核执行多个线程时,锁很可能被交换线程持有,特别是在交互模式下。另一个原因是悲观算法涉及死锁检测(产生开销),并通常使用读写锁(比标准自旋锁效率低)。
我们选择Silo是因为它比其他现有选项(如TicToc)简单,同时对大多数工作负载保持相同的性能。ETL有时比OCC更快,但它引入了假中止,可能会使用户混淆,而OCC则只在提交时中止。
OCC与2PL的区别举例
下面是会话同时更新同一个表时,两种用户体验的区别:悲观(针对基于磁盘的表)和乐观(针对MOT表)。
本例中,使用如下表测试命令:
table “TEST” - create table test (x int, y int, z int, primary key(x));本示例描述同一测试的两个方面:用户体验(本示例中的操作)和重试要求。
悲观方法示例 - 用于基于磁盘的表
下面是一个悲观方法例子(非MOT)。任何隔离级别都可能适用。
以下两个会话执行尝试更新单个表的事务。
WAIT LOCK操作发生,客户端体验是:会话2卡住,直到会话1完成COMMIT,会话2才能进行。
但是,使用这种方法时,两个会话都成功,并且不会发生异常中止(除非应用了SERIALIZABLE或REPEATABLE-READ隔离级别),这会导致整个事务需要重试。
表 3 悲观方法代码示例
| 会话1 | 会话2 | |
|---|---|---|
| t0 | Begin | Begin |
| t1 | update test set y=200 where x=1; | |
| t2 | y=200 | Update test set y=300 where x=1; - Wait on lock |
| t4 | Commit | |
| Unlock | ||
| Commit(in READ-COMMITTED this will succeed, in SERIALIZABLE it will fail) | ||
| y = 300 |
乐观方法示例 - 用于MOT
下面是一个乐观方法的例子。
它描述了创建一个MOT表,然后有两个并发会话同时更新同一个MOT表的情况。
create foreign table test (x int, y int, z int, primary key(x));- OCC的优点是,在COMMIT之前没有锁。
- OCC的缺点是,如果另一个会话更新了相同的记录,则更新可能会失败。如果更新失败(在所有支持的隔离级别中),则必须重试整个会话#2事务。
- 更新冲突由内核在提交时通过版本检查机制检测。
- 会话2将不会等待其更新操作,并且由于在提交阶段检测到冲突而中止。
表 4 乐观方法代码示例--用于MOT
| 会话1 | 会话2 | |
|---|---|---|
| t0 | Begin | Begin |
| t1 | update test set y=200 where x=1; | |
| t2 | y=200 | Update test set y=300 where x=1; |
| t4 | Commit | y = 300 |
| Commit | ||
| ABORT | ||
| y = 200 |